The creation of the ARM v2 was inspired by a desire to breach into the world of metal. For all previous projects wood has been the primary structural component. This novice metal assembly allowed me to explore the physical world of aluminum metal cutting and drilling.
Project Scope
1. The ARM v2 will be able to hold and maneuver a handheld camera
2. The ARM v2 will have precise control over its movements and be able to pick up blocks and stack(3) on top of each other
3. The ARM v2 will be able to pick up objects in a 1.5 foot radius semi-circle
4. The ARM v2 will be upgradable to include a camera for computer vision movement
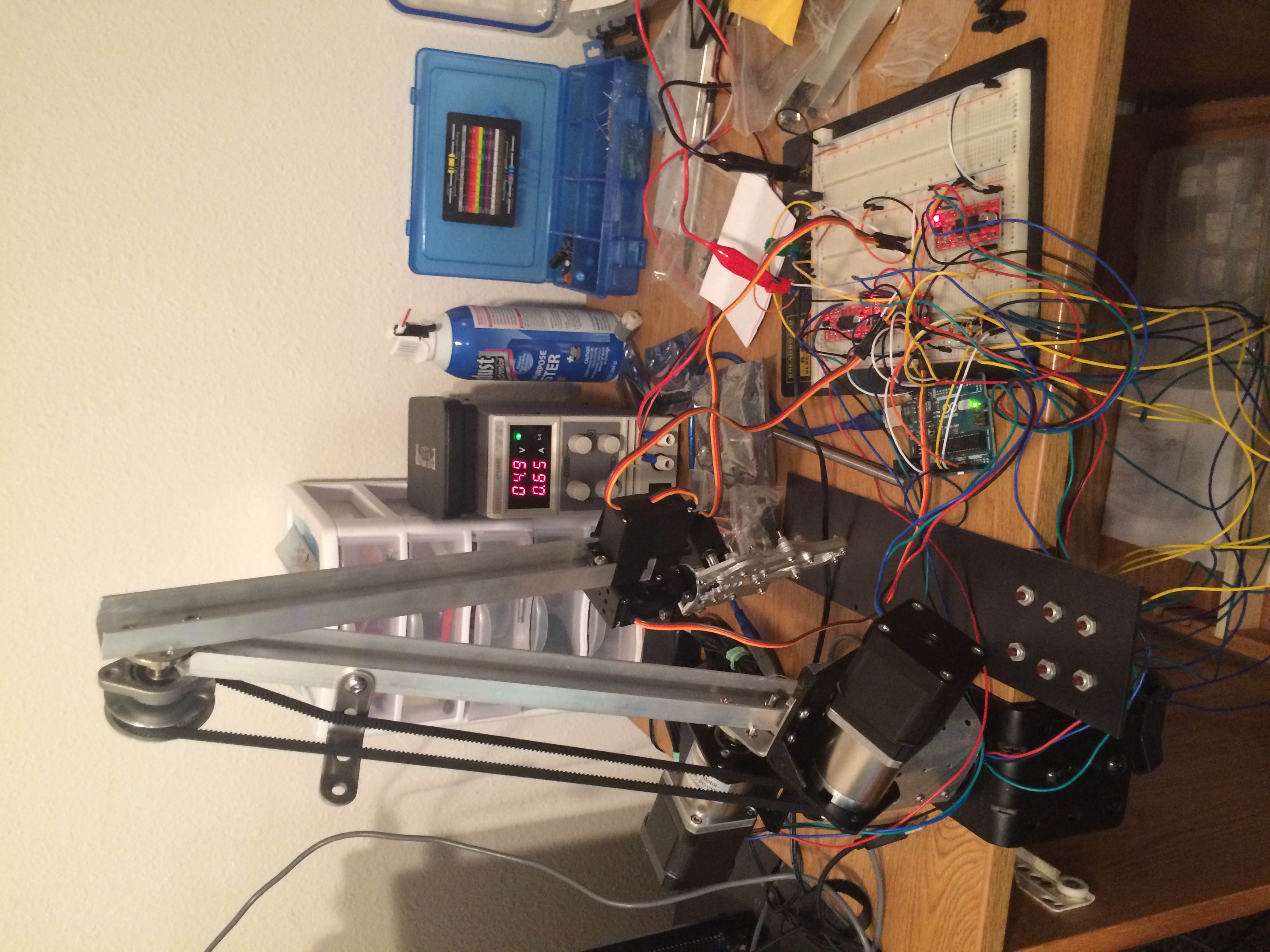
Testing
The ARM was able to complete all the goals assigned in the project scope. Video footage of this was recorded and posted below.